
Isochrone Maps with Python
Published:
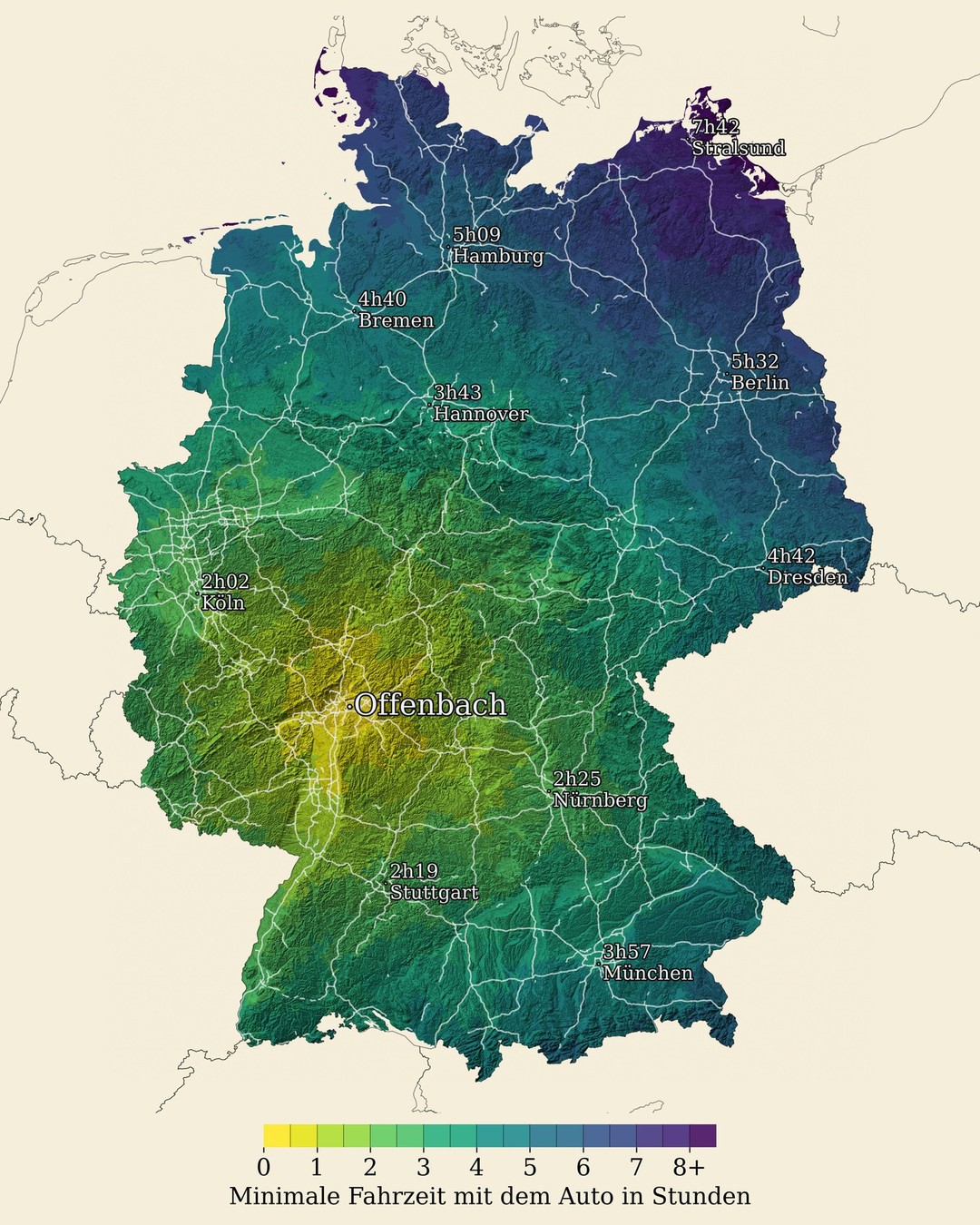
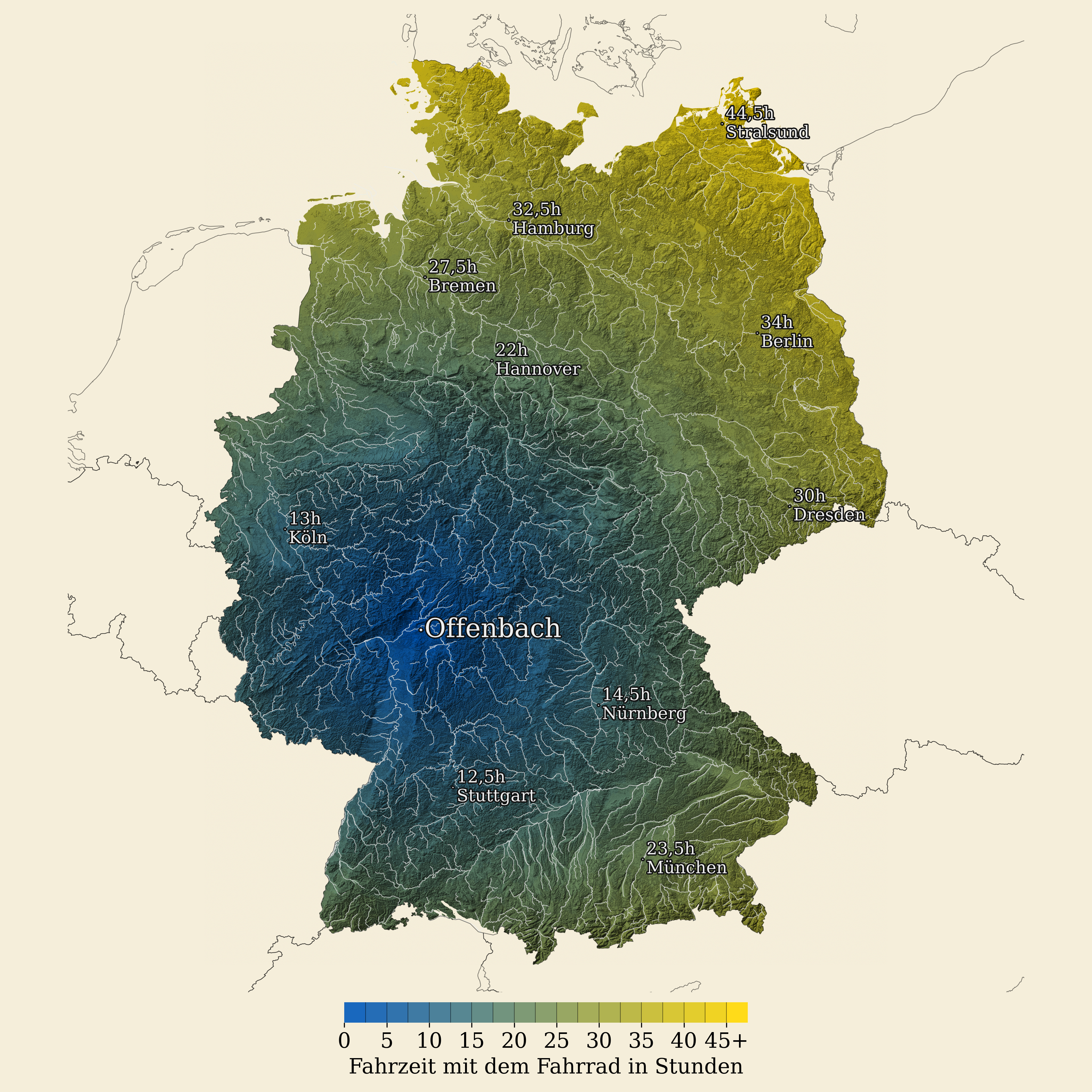
Isochrone maps show areas reachable within a given travel time from a starting point. This project combines OSRM travel time calculations with satellite-derived elevation data to produce maps that show both accessibility and topography.
Process overview
- Load and process a Digital Elevation Model (DEM)
- Calculate travel times via OSRM
- Color-code administrative areas by travel time
- Overlay hillshading, city labels, and street networks
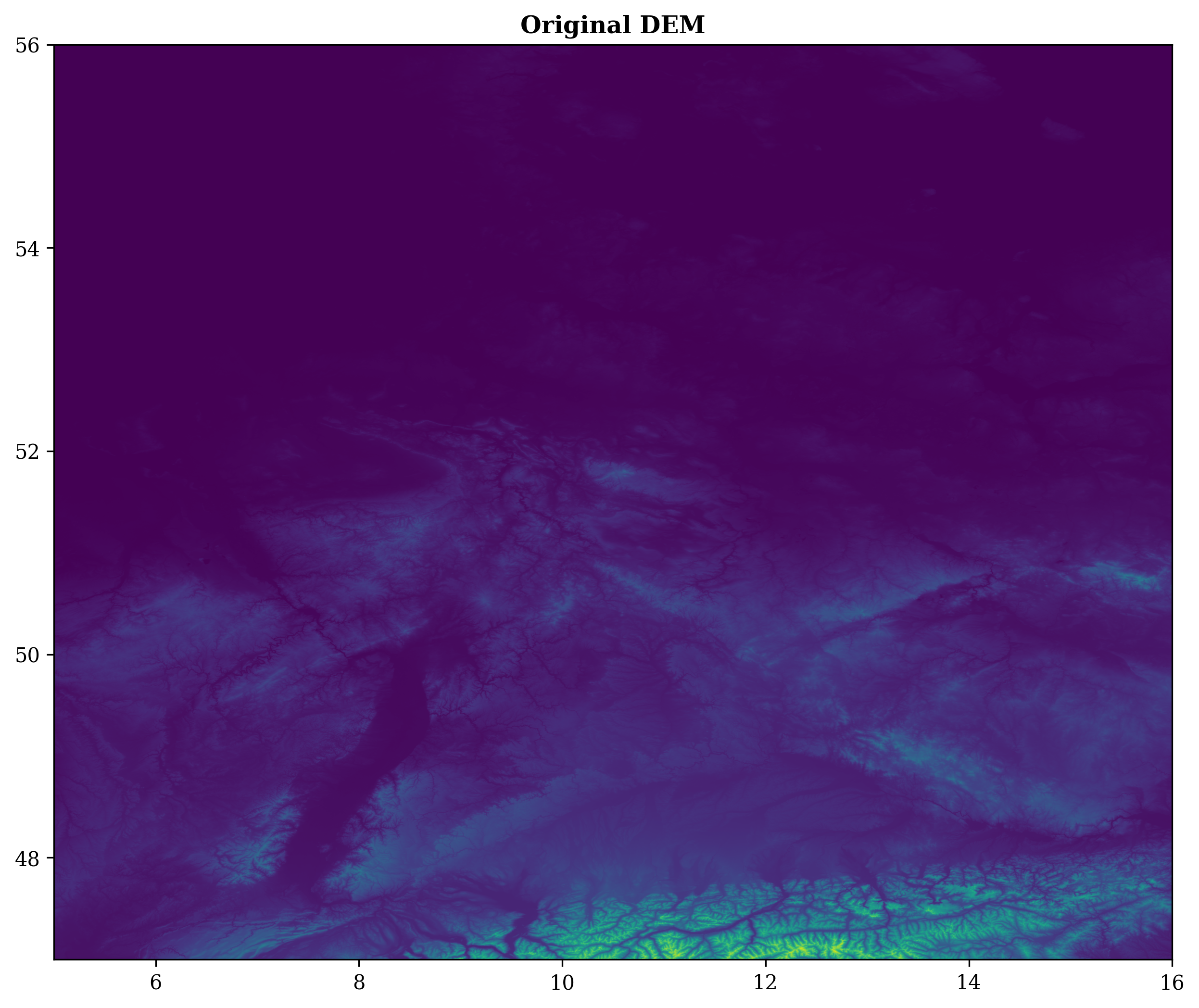
DEM processing
The elevation data goes through several steps: CRS transformation, masking to the area of interest, and hillshading.
def _process_dem(self):
if self.kwargs.use_elevation:
bounds = self.get_shp_bounds()
elevation_file = self.get_elevation_dem(bounds)
else:
elevation_file = self.kwargs.dem_file
with rio.open(elevation_file) as src:
working_dem = transform_dem(src, self.config["dem"]["dest_crs"])
if self.kwargs.reduce_size != 1.0:
working_dem = resize_dem(working_dem, self.kwargs.reduce_size)
working_dem = mask_dem(working_dem, self.admin_shp["geometry"])
transformed_shaded = hillshade(working_dem.read(1), azimuth=315, angle_altitude=45)
return recreate_dataset_reader(transformed_shaded, working_dem.meta, 1)
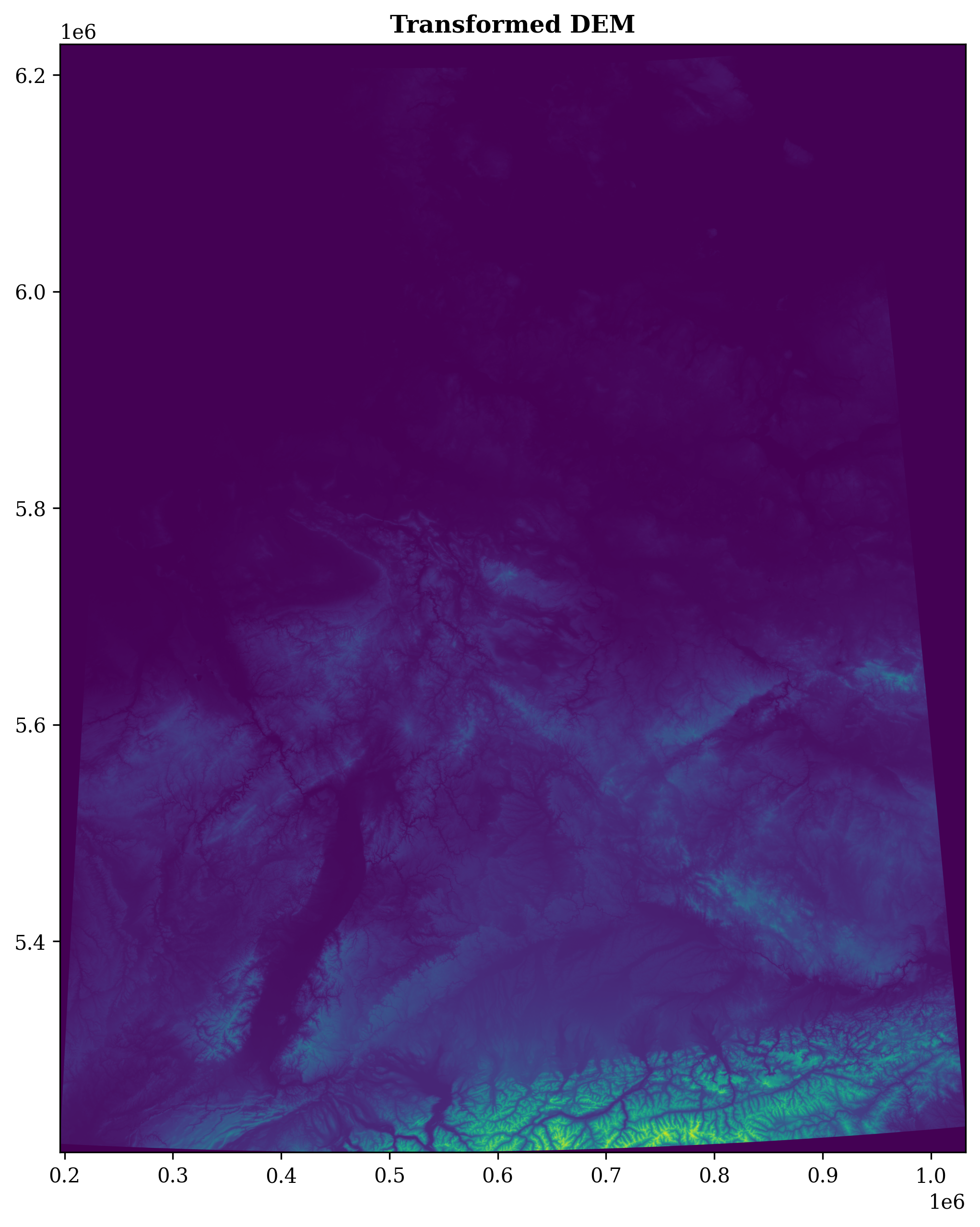
CRS transformation is straightforward with rasterio:
def transform_dem(dem_dataset, target_crs):
if dem_dataset.crs == target_crs:
return dem_dataset
transform, width, height = calculate_default_transform(
dem_dataset.crs, target_crs,
dem_dataset.width, dem_dataset.height,
*dem_dataset.bounds
)
kwargs = dem_dataset.meta.copy()
kwargs.update({'crs': target_crs, 'transform': transform, 'width': width, 'height': height})
return recreate_dataset_reader(dem_dataset.read(), kwargs)
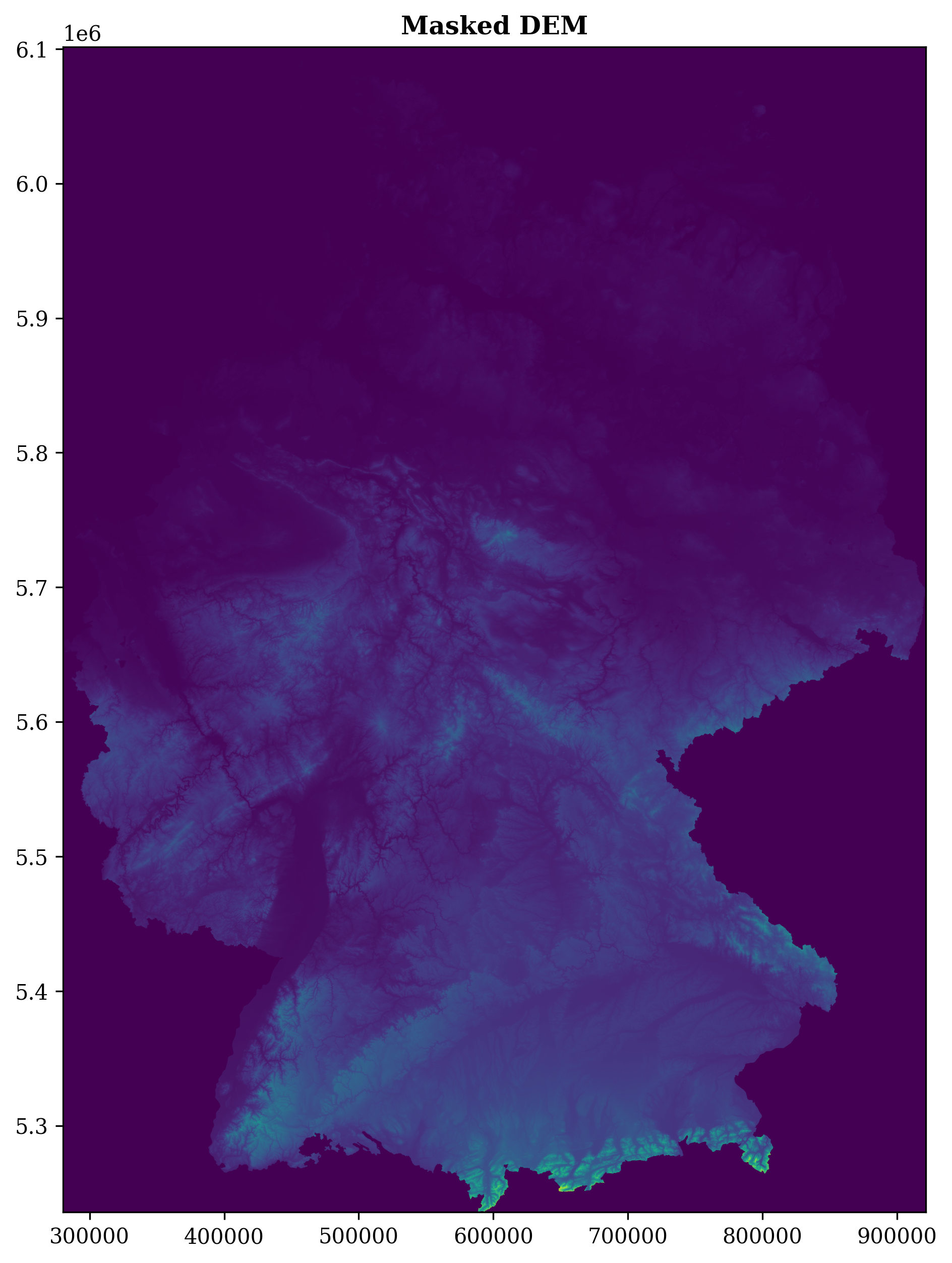
Masking clips the raster to the administrative boundary:
def mask_dem(dem_dataset, geometries):
out_image, out_transform = rio_mask(dem_dataset, geometries, crop=True, all_touched=True)
out_meta = dem_dataset.meta.copy()
out_meta.update({
"height": out_image.shape[1], "width": out_image.shape[2], "transform": out_transform
})
return recreate_dataset_reader(out_image, out_meta)
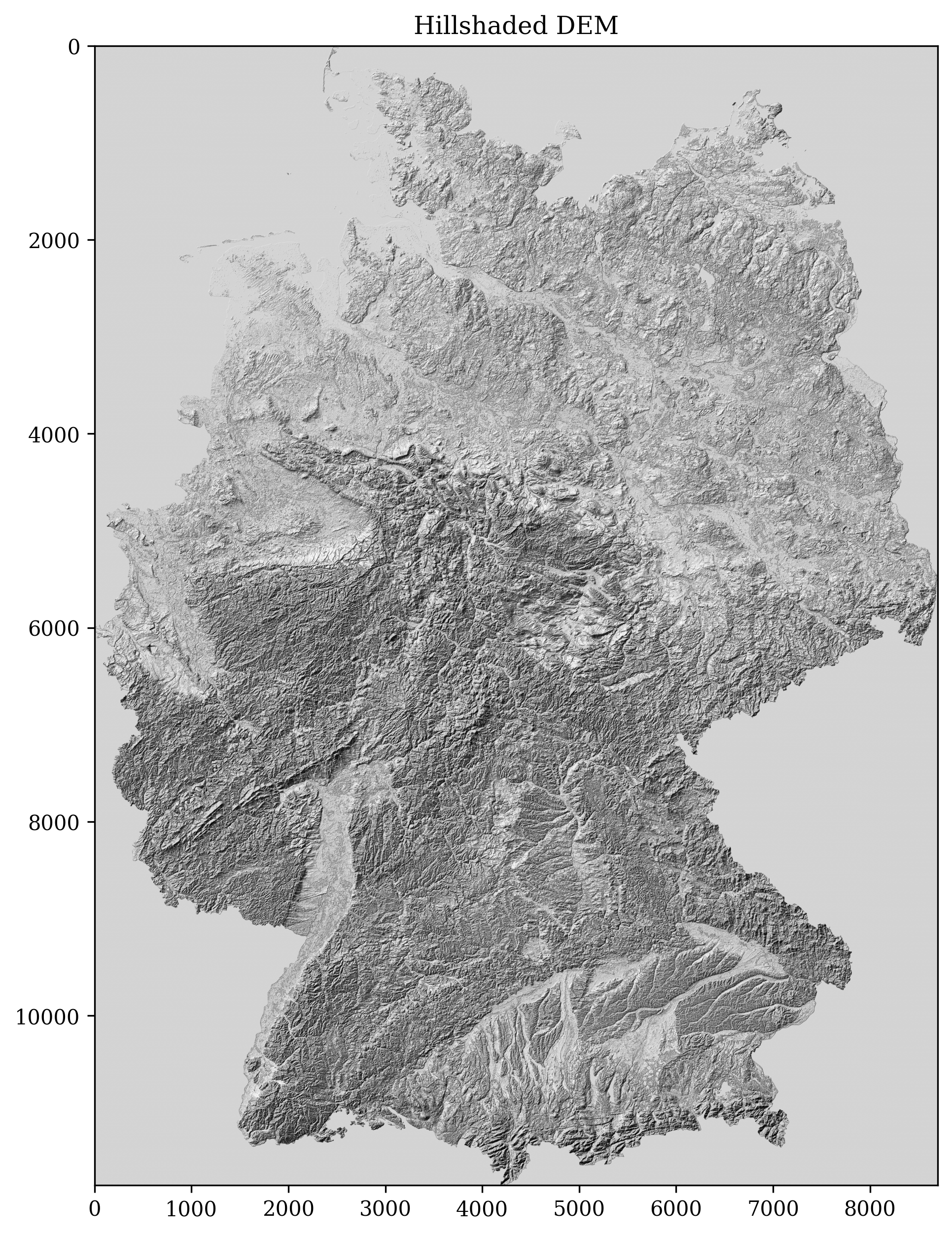
Hillshading uses gradient-based slope and aspect calculation:
def hillshade(array, azimuth=315, angle_altitude=45):
x, y = np.gradient(array)
slope = np.pi/2 - np.arctan(np.sqrt(x*x + y*y))
aspect = np.arctan2(-x, y)
azimuthrad = azimuth * np.pi / 180
altituderad = angle_altitude * np.pi / 180
return (np.sin(altituderad) * np.sin(slope) +
np.cos(altituderad) * np.cos(slope) *
np.cos((azimuthrad - np.pi/2) - aspect)) * 255
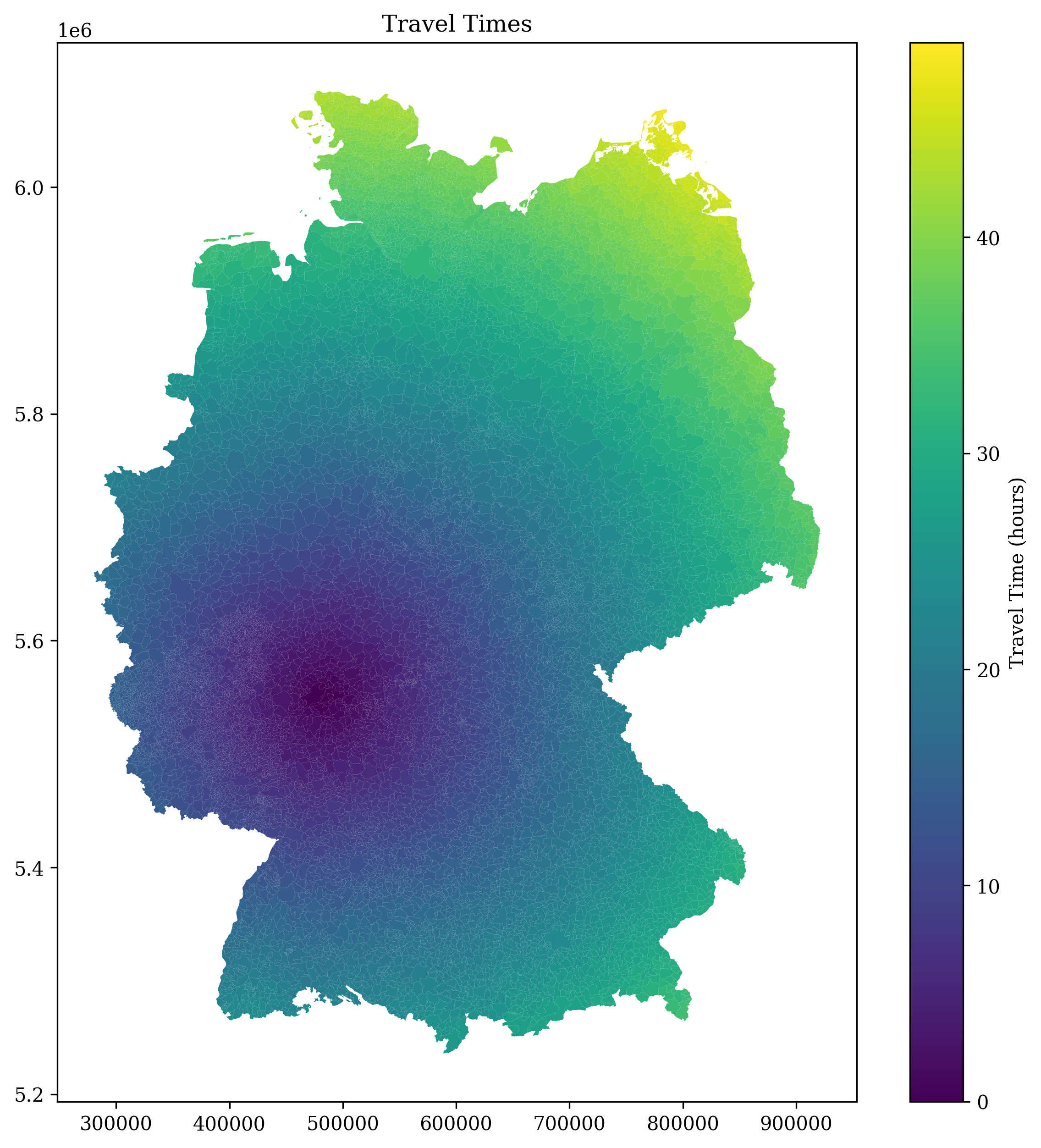
Travel time calculation
OSRM (Open Source Routing Machine) computes driving times from a central point to the centroid of every administrative area. Coordinates are converted from UTM to WGS84 before querying:
class OSRM:
def calculate_travel_time(self, gdf):
gdf = self._init_gdf_fields(gdf)
for _, row in tqdm(gdf.iterrows(), total=len(gdf)):
utm_x, utm_y = row["geometry"].centroid.coords[0]
lat, lon = utm.to_latlon(utm_x, utm_y, 32, 'U')
result = self._get_distance_duration(lat, lon)
if result:
distance, duration = result
gdf = self._update_gdf(gdf, row["DEBKG_ID"], lat, lon, distance, duration)
return gdf
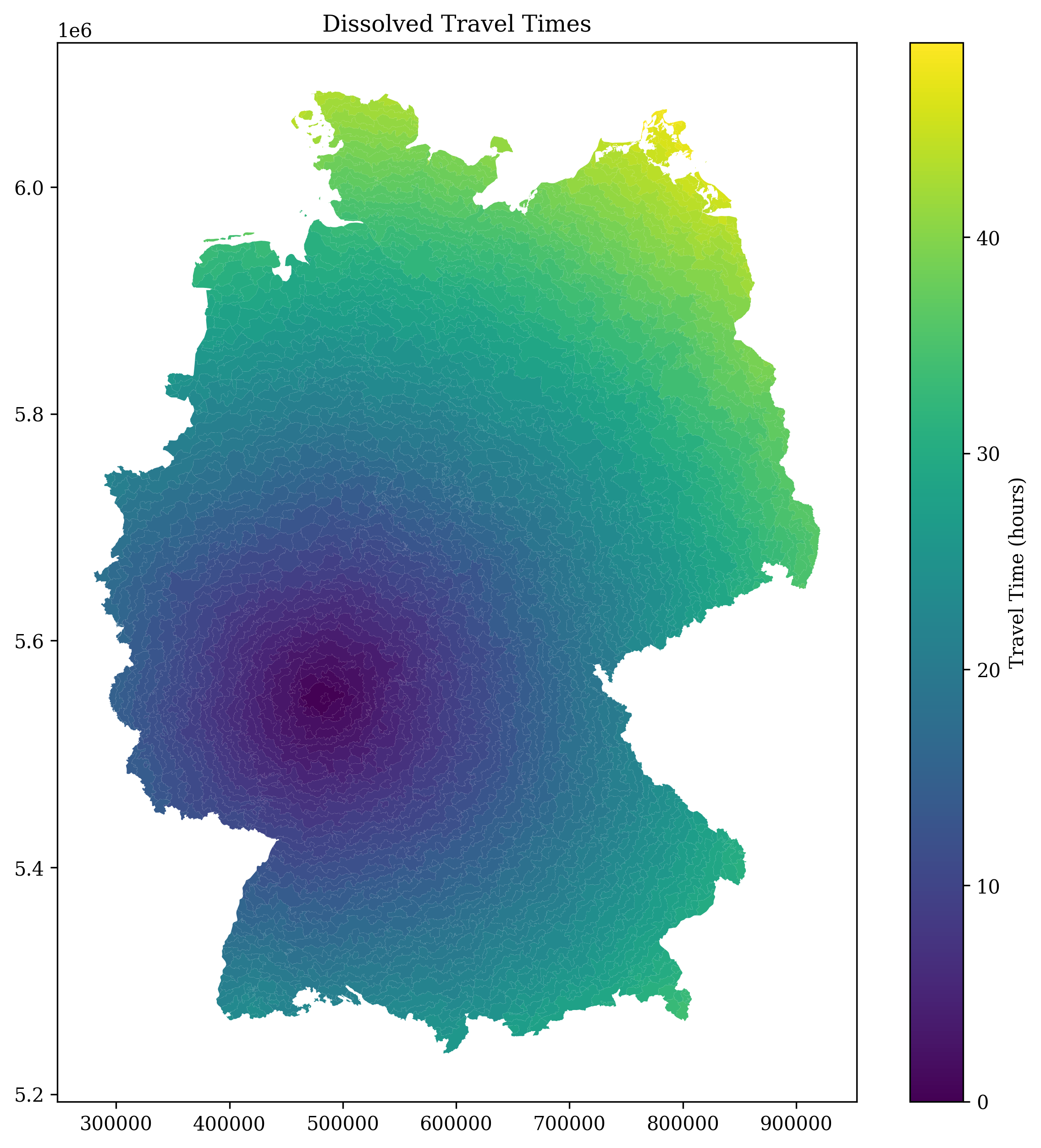
The areas are then dissolved by travel time bucket for a cleaner visualization:
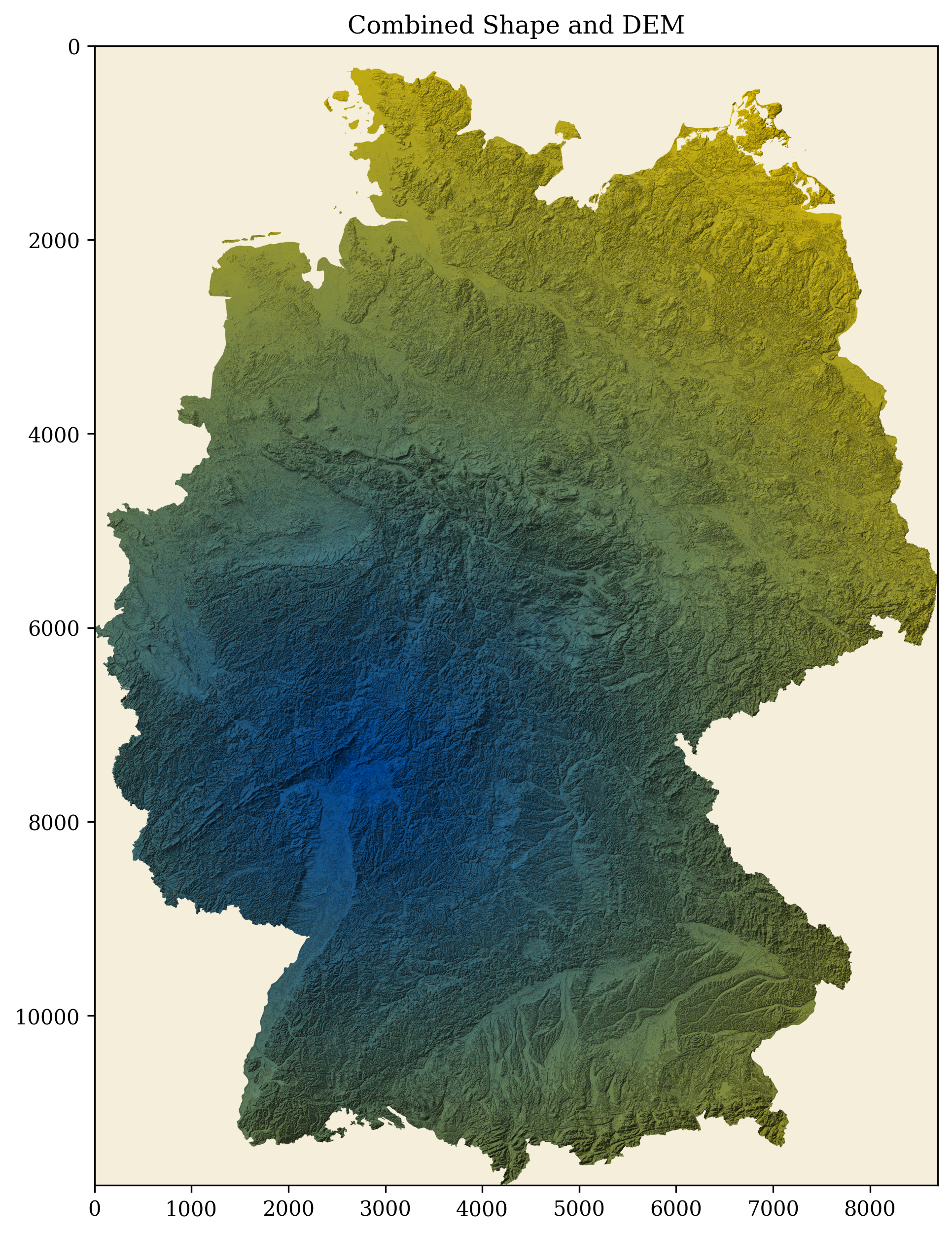
Combining DEM and travel times
Each administrative area is colored by travel time using a gold-to-blue gradient, then multiplied with the hillshade raster:
def combine_shape_dem(self, admin_gdf, dem):
unique_colors = len(admin_gdf["traveltime_h"].unique())
cmap = LinearSegmentedColormap.from_list(
"Custom", [(255/255, 215/255, 0/255), (0/255, 87/255, 183/255)], N=unique_colors
)
base_image = np.full((dem.shape[0], dem.shape[1], 3), np.array([0, 0, 0]))
for _, area in tqdm(admin_gdf.iterrows(), total=len(admin_gdf)):
out_image, _ = rio_mask(dem, [area["geometry"]], crop=False, all_touched=False)
color_index, ccode = self._get_colorcode_val(
area["traveltime_h"], area["traveltime_h30"], unique_colors
)
rgba = cmap(ccode)
rgb = np.array(rgba[:3])
base_color = np.full((dem.shape[0], dem.shape[1], 3), rgb)
image_data = np.expand_dims(out_image[0, :, :], axis=2)
base_image = base_image + np.rint(base_color * image_data).astype("int")
return base_image
Final map
The final render adds city labels, a street network overlay, and a legend:
def plot_map(colored_image, street_graph_edges, city_label_gdf, eu_gdf, config, legend_used_colors):
fig, ax = plt.subplots(figsize=config["map"]["size"])
ax.imshow(colored_image)
if street_graph_edges is not None:
street_graph_edges.plot(ax=ax, linewidth=0.5, alpha=0.5)
for idx, row in city_label_gdf.iterrows():
ax.annotate(row['city'], (row.geometry.x, row.geometry.y), fontsize=config["map"]["fontsize"])
plot_legend(ax, legend_used_colors)
plt.savefig(config["map"]["output_file"], dpi=300, bbox_inches='tight')
The coordinate handling juggles WGS84 (EPSG:4326) for GPS coordinates and UTM Zone 32N (EPSG:25832) for local measurements, with rasterio and GeoPandas handling the conversions.